Berlin Driving Simulator
The Berlin Driving Simulator is a hydraulically actuated transient maneuvering driving simulator. The simulator is composed of a base driven by a hydraulic actuator in the lateral direction on linear bearings and 6 actuators attach the simulator room to the base in a typical flight simulator linkage configuration. The 6 actuators allow the vehicle to yaw, roll, pitch and also allow limited translation in the lateral, vertical and fore/aft directions.
The simulator room contains video projection in the forward 180-degree view and a rear view projector, which can be seen in the vehicle mirrors. The simulator room also contains the driving cabin, which is an actual vehicle or driving cabin rigidly attached to the simulator room floor. The steering is replaced with a force feedback system where the steering gear would normally be located. The simulator room also contains sound equipment for generating engine, wind, orange cone impact and tire squeal noise. All vehicle controls function as per a normal vehicle to provide input to the simulator.
The simulator control system uses driver input from normal steering, braking and accelerator controls to orient the video projection and to move the simulator room so that the driver experiences realistic vehicle attitude, motions and force feedback. The machine simulates most realistically transient lateral displacement maneuvers from the straight-ahead driving position. Typical maneuvers such as slalom, lane change and transient steer tests are the most realistic driving experiences.
Correlation with Real Vehicle
The Berlin Driving Simulator is capable of delivering a realistic vehicle experience primarily based on transient lateral acceleration, vehicle roll angle, vehicle side slip angle, vehicle loaded attitude, steering position and force feedback, wind noise and tire squeal.
Personal Comments
Initially the simulator feels artificial and it took me about 45 minutes to ’trust’ what I knew to be an artificial horizon from the video projection system. Very small steering inputs (± 10°) give the impression of a ’lumpy’ or ‘sticky’ ride response probably occurring as a result of the response lag from the hydraulic inertia of the system. For larger steer inputs the simulator response is more realistic.
Accelerating and decelerating the vehicle made me feel as if I was ‘surfing on a wave’. The simulator has extremely limited capabilities in generating longitudinal acceleration.
The ‘perfectness' of the road surface and the ‘perfectness' of the vehicle allowed for very precise and controlled evaluations. This benefit coupled with the ability to switch vehicle configurations from the control console, in near real time, and run the exact same events (slalom and lane change) indefinitely enabled the driver to evaluate the different vehicle configurations in a more scientifically controlled test than in an actual vehicle on an actual road surface.
After a week of simulator driving I was still amazed at the motion of approximately 12 tonnes of simulator ‘flying’ about the building within the limits of the hydraulic actuators when viewed from the control console.
To obtain maximum benefit from the simulator the driver needs to be focussed on evaluation and driving technique and to ‘shut out’ the artificialness of the display and quirky steady state effects.
Benefits
Symmetry
The simulator vehicle model is symmetric left to right (symmetric left to right in kinematics and compliance, mathematically round tires with consistent tire spring rates and damping and symmetric left to right steering response and efforts). This improves the subjective evaluation allowing for a more consistent evaluation of the delta between evaluated components. Real world subjective evaluations are often affected by the variation in how the vehicle feels left to right. This is particularly evident in any maneuver involving steering inputs, which affect changes in transient wheel loading left to right.
The road surface ‘perfectness’ (mathematically flat, constant coefficient of friction, constant light reflectivity and mathematically straight) and lack of ride inputs also improve the driver’s ability to identify subtle variations in vehicle feel and behavior for vehicle configuration changes.
Repeatability
The simulator model can be updated in near real time with any model post processed for simulator use. This feature allows the baseline to be reevaluated at any time. When reevaluating a model it is always identical and consistent to previous evaluations. The track conditions are consistent and changes in grip due to moisture, radiant heating / cooling are not present.
Driver Consistency
By using the cruise control evaluations can be run at constant speed negating the surfing on a wave feeling when the simulator attempts to induce a longitudinal acceleration.
The simulator provides an ideal forum for driver training. Cone based events such as lane changes and slaloms are automatically setup on a regular basis without having to reset cones after each run.
Correlation - Vehicle to Simulator
The simulator is an excellent tool for building rapport between simulation and dynamics engineers. Allows sharing of information, issues, and aids in achieving correlation between dynamics and simulation engineers.
The ‘closed room’ layout of the simulator keeps simulation and dynamics engineers in constant communication with each other. This helps when checking on the validity of run data. Modifications to the simulator model can be generated quickly by the simulation engineers based on subjective feedback from the dynamics engineers.
Constraints / Limitations
Constant Speed
The simulator has only limited capability to move fore/aft. This travel limitation is insufficient to produce any significant longitudinal acceleration. When accelerating to test speed or decelerating at the end of a test the acceleration sensation is like ‘surfing on a wave’. Once a constant speed is reached a normal driving sensation is experienced.
Transients Only
The simulator is not used to evaluate steady state cornering because such events require excessive lateral deflections over time to simulate continuous lateral forces.
Due to practical limitations in simulator travel the degrees of freedom of the simulator motions are scaled from the real world. Once the driver makes a conscious adjustment the scaling effects become less noticeable.
| Degree of Freedom | Scaling (%) 100% = actual | Max Available for 1 DOF |
|---|---|---|
| Roll | 30 | +/- 30 degrees |
| Yaw | 30 | +/- 30 degrees |
| Pitch | 30 | +/- 30 degrees |
| Lateral Acceleration | 80 | 5.6 m total |
| Longitudinal Acceleration | 15 | N/A |
Table 1 - Simulator Degrees of Freedom
No Ride Events
The simulator is not used to evaluate driving events that are primarily due to longitudinal or vertical displacements. No base excitation from road surfaces is simulated.
Virtual Reality
Motion sickness can result from the simulator running out of travel or the lack of a known visual horizon to orient to. Some familiarization is required to adjust to the artificialness of driving. This is particularly true when the simulator suffers a soft or hard stop as a result of running out of lateral travel. The simulator will return to the home position after a hard stop. The lateral and vertical accelerations experienced during this maneuver do not correlate with the display motion.
The simulator display resolution is also due for upgrade. The low-resolution display results in some eyestrain after a full day of simulator use.
Case Study 1 - HB front stabar non linear rate –vs- hysteresis
An interesting outcome of the initial ND simulations clearly showed the root cause of the HB issue relating to vague and darty steering at sub limit maneuvers. After evaluating roll stiffness distribution on the ND simulations were run with the model modified to simulate the HB front stabar non-linear rate and hysteresis as depicted in SPMM data (C04382). The flexibility of the simulator allowed evaluations of hysteresis only –vs- the baseline, non-linear roll rate –vs- the baseline and the combination (actual vehicle) of hysteresis + non-linear roll rate –vs- the baseline. The separation of hysteresis and non-linear roll rate has not been evaluated on the actual HB vehicle.
The hysteresis only evaluation resulted in vague turn in response with low steer feedback just off center and then when steer effort increased (non linearly) the vehicle yaw rate increased (darty). This behavior was similar to the roll velocity of the HB 123 wk and S0 as built Phase A vehicles. With non-linear roll rate only the roll stiffness distribution and balance actually improved probably due to the non-optimized baseline evaluated in this evaluation. But the initial turn in roll angle increased. This roll velocity or roll dip increase was also similar to the HB character.
Case Study 2 – Understanding the Rollover Mechanism
Another interesting outcome of a GVW ND run was the capture of data showing how vehicle rollover occurs. The rollover event occurred at the end of a slalom run. The plots are included here to graphically demonstrate the comprehensive data available from simulation runs. The first plot shows the final cone and exit from a successful slalom run. (successful = consistent and appropriate dynamics driving style) The second plot shows the exit and rollover from an unsuccessful slalom evaluation run with a more aggressive driving style. (Unsuccessful = aggressive driving style resulting in loss of vehicle control) The rollover plot shows 4 distinct data regions.
-
Region 1: Typical slalom data (< 26.3 secs)
-
Region 2: Loss of vehicle control with rapid weight transfer at the tire contact patches and diverging vehicle yaw angle (26.3 to 29.10 secs) Note the momentary lift off / unloading of both front tires in this region.
-
Region 3: Wheel lift and rollover (29.10 to 29.6 secs)
-
Region 4: Vehicle has rolled over and simulator has stopped due to mathematical singularities (> 29.6 secs)
Once the GVW load case was run successfully the evaluation was re run with a more aggressive driving style to see what the ultimate failure mechanism would be. The simulator allows the driver to overdrive the vehicle without the risks associated with performing the same maneuvers on a real vehicle. Observers were monitoring data channels in real time to see if vertical wheel loads indicated wheel lift off for the GVW load case. Refer to Table 2 for German to English Translation.
The technical root cause of the rollover was excessive yaw angle leading to tripping. As can be seen from plot 2 the vehicle yaw attitude diverged above typical slalom yaw angle values of ± 15° near the end of the slalom run. Front wheel lift off occurred on both front wheels prior to lift off.
At high lateral accelerations the simulator uses up all the lateral travel and the increased yaw of the cabin at GVW uses up a substantial portion of the travel of the other 6 hydraulic actuators. The simulator looks like it is trying to ’tie itself in a knot’ when viewed from the control room during these high yaw angle maneuvers.
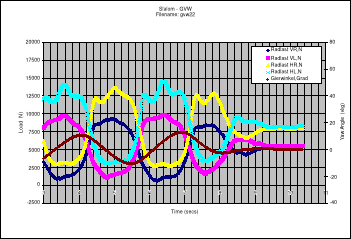
Figure 1 - Slalom Data
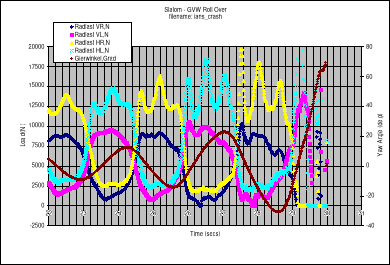
Figure 2 - Slalom Data with Rollover
Instrumented Handling Data Output
A comprehensive suite of channels can be recorded and output with real time simulator data. Over 120 channels of data equivalent to a fully instrumented vehicle can be exported in ASCII or binary format.
The data is clean without much of the noise associated with real world data such as wheel hop and ‘roll rock’ driven by uneven road surfaces and vehicle asymmetry.
| Channel No. | English | German | Channel No. | English | German |
|---|---|---|---|---|---|
| 0 | Time (s) | Zeit,[s] | 85 | Left front braking moment (N-m) | Bremsmoment VL,Nm |
| 1 | Vehicle Speed (kph) | Geschwindigkeit,km/h | 86 | Right rear braking moment (N-m) | Bremsmoment HR,Nm |
| 2 | Yaw angle (deg) | Gierwinkel,Grad | 87 | Left rear braking moment (N-m) | Bremsmoment HL,Nm |
| 3 | Sideslip angle (deg) | Schwimmwinkel,Grad | 88 | Right Tie Rod Load, N | Spurstangenkraft VR,N |
| 4 | Radius of Curvature (m) | Polabstand,m | 89 | Left Tie Rod Load, N | Spurstangenkraft VL,N |
| 5 | Fore/aft acceleration (m/s2) | Tangentialbeschleunigung,m/s**2 | 90 | Rack Load, N | Zahnstangenkraft,N |
| 6 | Lateral Acceleration (m/s2) | Radialbeschleunigung,m/s**2 | 91 | Right Steering Axis Moment, N-m | Spreizachsenmoment VR,Nm |
| 7 | Right front jounce (mm) | Federweg VR,mm | 92 | Left Steering Axis Moment, N-m | Spreizachsenmoment VL,Nm |
| 8 | Left front jounce (mm) | Federweg VL,mm | 93 | Stabar front wheel load (N) | Stabilisatorkraft VL,N |
| 9 | Right rear jounce (mm) | Federweg HR,mm | 94 | Federgeschw._Rad_VR,m/s | |
| 10 | Left rear jounce (mm) | Federweg HL,mm | 95 | Federgeschw._Rad_VL,m/s | |
| 11 | Spung CG x-coord (m) | Schwerpunktkoordinate x,m | 96 | Federweg am Teil hi re,mm | |
| 12 | Spung CG y-coord (m) | Schwerpunktkoordinate y,m | 97 | Federweg am Teil hi li,mm | |
| 13 | Spung CG z-coord (m) | Schwerpunktkoordinate z,m | 98 | Stabar rear wheel load (N) | Stabilisatorkraft HL,N |
| 14 | Roll angle (deg) | Wankwinkel,Grad | 99 | Federgeschw._Rad_HR,m/s | |
| 15 | Right front tire normal force (N) | Radlast VR,N | 100 | Federgeschw._Rad_HL,m/s | |
| 16 | Left front tire normal force (N) | Radlast VL,N | 101 | Steering wheel torque (N-m) | Lenkradmoment,Nm |
| 17 | Right rear tire normal force (N) | Radlast HR,N | 102 | Rack pinion toruqe (N-m) | Schnittmoment Lenksäule,Nm |
| 18 | Left rear tire normal force (N) | Radlast HL,N | 103 | Zahnstangenverschiebung,mm | |
| 19 | Right front tire lateral force (N) | Seitenkraft VR,N | 104 | Trägheitsmoment Lenkrad,Nm | |
| 20 | Left front tire lateral force (N) | Seitenkraft VL,N | 105 | Reibmoment Zahnstange,Nm | |
| 21 | Right rear tire lateral force (N) | Seitenkraft HR,N | 106 | Zahnstangenreibung,N | |
| 22 | Left rear tire lateral force (N) | Seitenkraft HL,N | 107 | Mantelrohrreibung,Nm | |
| 23 | Right front slip angle (deg) | Schräglaufwinkel VR,Grad | 108 | Lenkungsdämpferkraft,N | |
| 24 | Left front slip angle (deg) | Schräglaufwinkel VL,Grad | 109 | Servodruck,bar | |
| 25 | Right rear slip angle (deg) | Schräglaufwinkel HR,Grad | 110 | Torsionsstabverdrehung,Grad | |
| 26 | Left rear slip angle (deg) | Schräglaufwinkel HL,Grad | 111 | flag-sw-motion,- | |
| 27 | Radeinschlag,Grad | 112 | phi-sw-deg,Grad | ||
| 28 | Umfangskraft,N | 113 | phi-sw,rad | ||
| 29 | Yaw rated (deg/sec) | Giergeschwindigkeit,Grad/s | 114 | phi-sc,rad | |
| 30 | Path distance (m) | Wegstrecke,m | 115 | phi-pi,rad | |
| 31 | Road wheel steer angle (deg) | Lenkwinkel,Grad | 116 | omega-sw-deg,Grad/s | |
| 32 | Right front tire longitudinal force (N) | Umfangskraft VR,N | 117 | omega-sw,rad/s | |
| 33 | Left front tire longitudinal force (N) | Umfangskraft VL,N | 118 | omega-sw-old,rad/s | |
| 34 | Right rear tire longitudinal force (N) | Umfangskraft HR,N | 119 | omega-sw-dot,rad/s/s | |
| 35 | Left rear tire longitudinal force (N) | Umfangskraft HL,N | 120 | t-driver,Nm | |
| 36 | Right front slip (%) | Schlupf VR,% | 121 | t-sw,Nm | |
| 37 | Left front slip (%) | Schlupf VL,% | 122 | t-sc,Nm | |
| 38 | Right rear slip (%) | Schlupf HR,% | 123 | t-tb,Nm | |
| 39 | Left rear slip (%) | Schlupf HL,% | 124 | t-pi,Nm | |
| 40 | Right front accelerating moment (N-m) | Antriebsmoment VR,Nm | 125 | t-ehl,Nm | |
| 41 | Left front accelerating moment (N-m) | Antriebsmoment VL,Nm | 126 | t-sw-friction,Nm | |
| 42 | Right rear accelerating moment (N-m) | Antriebsmoment HR,Nm | 127 | rack-and-pinion,- | |
| 43 | Left rear accelerating moment (N-m) | Antriebsmoment HL,Nm | 128 | s,m | |
| 44 | Rad-Leistung,PS | 129 | s-dot,m/s | ||
| 45 | Overall CG height Z (m) | Fahrzeugschwerpunkt Z,m | 130 | f-sr,N | |
| 46 | FCT-Zeit,ms | 131 | f-sr-tires,N | ||
| 47 | Nickwinkel,Grad | 132 | f-sr-friction,N | ||
| 48 | Steering wheel angle (deg) | Lenkradwinkel,Grad | 133 | f-sr-damper,N | |
| 49 | Lenkw.-Ackermannw.,Grad | 134 | steer-angle-deg,Grad | ||
| 50 | Schwimmwinkel HA,Grad | 135 | steer-angle,rad | ||
| 51 | Wankgeschwindigkeit,Grad/s | 136 | flag-sr-motion,- | ||
| 52 | Right front dynamic slip angle (deg) | dyn Schraeglaufwinkel VR,Grad | 137 | f-ehl,N | |
| 53 | Left front dynamic slip angle (deg) | dyn Schraeglaufwinkel VL,Grad | 138 | Sperrmo-Zentralsp.,Nm | |
| 54 | Right rear dynamic slip angle (deg) | dyn Schraeglaufwinkel HR,Grad | 139 | DELRITZ_HV,U/min | |
| 55 | Left rear dynamic slip angle (deg) | dyn Schraeglaufwinkel HL,Grad | 140 | UEB,- | |
| 56 | Right front camber relative to ground (deg) | Sturz rel zur Straße VR,Grad | 141 | AUSKUPPELN,- | |
| 57 | Left front camber relative to ground (deg) | Sturz rel zur Straße VL,Grad | 142 | NRELP,U/min | |
| 58 | Right rear camber relative to ground (deg) | Sturz rel zur Straße HR,Grad | 143 | MKUEBS,Nm | |
| 59 | Left rear camber relative to ground (deg) | Sturz rel zur Straße HL,Grad | 144 | NRELKUEB,U/min | |
| 60 | Right front camber relative to vehicle (deg) | Sturz VR,Grad | 145 | MSCHALT,Nm | |
| 61 | Left front camber relative to vehicle (deg) | Sturz VL,Grad | 146 | KUEBSIG,- | |
| 62 | Right rear camber relative to vehicle (deg) | Sturz HR,Grad | 147 | GANGWIRK,- | |
| 63 | Left rear camber relative to vehicle (deg) | Sturz HL,Grad | 148 | KUPZUS,- | |
| 64 | Right front steer angle (deg) | Spur VR,Grad | 149 | MKUPPL,Nm | |
| 65 | Left front steer angle (deg) | Spur VL,Grad | 150 | MHINT,Nm | |
| 66 | Right rear steer angle (deg) | Spur HR,Grad | 151 | MVORN,Nm | |
| 67 | Left rear steer angle (deg) | Spur HL,Grad | 152 | DK_Winkel,Grad | |
| 68 | Right front kinematic steer (deg) | kinematische Spur VR,Grad | 153 | Motor-Leistung,PS | |
| 69 | Left front kinematic steer (deg) | kinematische Spur VL,Grad | 154 | UeGes,1 | |
| 70 | Right rear kinematic steer (deg) | kinematische Spur HR,Grad | 155 | M_Motor,Nm | |
| 71 | Left rear kinematic steer (deg) | kinematische Spur HL,Grad | 156 | M_Turbine,Nm | |
| 72 | Right front compliance steer (deg) | elastokin Spur VR,Grad | 157 | MGetrA,Nm | |
| 73 | Left front compliance steer (deg) | elastokin Spur VL,Grad | 158 | M_Pumpe,Nm | |
| 74 | Right rear compliance steer (deg) | elastokin Spur HR,Grad | 159 | Nue_Wandl,1 | |
| 75 | Left rear compliance steer (deg) | elastokin Spur HL,Grad | 160 | Eta_Wandl,1 | |
| 76 | Right front aligning moment (N-m) | Reifenrückstellmoment VR,Nm | 161 | vRad vl,km/h | |
| 77 | Left front aligning moment (N-m) | Reifenrückstellmoment VL,Nm | 162 | vRad vr,km/h | |
| 78 | Right rear aligning moment (N-m) | Reifenrückstellmoment HR,Nm | 163 | vRad hl,km/h | |
| 79 | Left rear aligning moment (N-m) | Reifenrückstellmoment HL,Nm | 164 | vRad hr,km/h | |
| 80 | Right front tire-road coefficient of friction | Reibungsbeiwert VR,- | 165 | n_Motor,U/min | |
| 81 | Left front tire-road coefficient of friction | Reibungsbeiwert VL,- | 166 | n_Turbine,U/min | |
| 82 | Right rear tire-road coefficient of friction | Reibungsbeiwert HR,- | 167 | n_Getriebe_ab,U/min | |
| 83 | Left rear tire-road coefficient of friction | Reibungsbeiwert HL,- | 168 | M_Motreg,Nm | |
| 84 | Right front braking moment (N-m) | Bremsmoment VR,Nm | 169 | Anstroemwinkel,Grad |
Table 2 - Simulator Channels
Data
| Run Number | Vehicle Model | Evaluation Description | Date of Run | Time of Run | Test Recorded | Filenames |
|---|---|---|---|---|---|---|
| 1 | AN84 | Curved Road Familiarization | 07/22/02 | 11:00:00 | ||
| 2 | AN84 | AN84 | 11:30:00 | |||
| 3 | AN84 | AN84 Reduced Front Lateral Stiffness | 12:30:00 | Slalom | Initial_stiff | |
| 3 | AN84 | AN84 Reduced Front Lateral Stiffness | 12:30:00 | Slalom | Less_stiff | |
| 4 | AN84 | 14:15:00 | ||||
| 5 | ND | |||||
| 6 | ND | Slalom | ian_slalom_8per, | |||
| 7 | ||||||
| 8 | ND | |||||
| 9 | Overslung Underslung | 07/23/02 | 13:45:00 | Slalom, Lane Change | ian_sl_underslung | |
| 13:45:00 | Slalom, Lane Change | ian_sl_tension | ||||
| 10 | ND4x4 | Front Stabar Non Linear Rate / Hysteresis | 07/23/02 | 15:45:00 | ||
| 11 | ND4x4 | Rack Bushing Rates | 07/23/02 | 17:00:00 | ||
| 12 | ND4x4 | FLCA Bushing | 07/24/02 | 11:00:00 | ||
| 13 | ND4x4 | Steering Boost Curve | 07/24/02 | 14:00:00 | ||
| 14 | ND4x4 | GVW | 07/24/02 | 14:45:00 | Slalom, Lane Change | |
| 15 | ND4x4 | Wrangler RTS –vs- Eagle LS | 07/24/02 | 16:45:00 | Slalom, Lane Change | |
| 16 | ND4x2/4x4 | 4x4 –vs- 4x2 | 07/24/02 | 17L30 | 4x4baseline14, 4x2baseline14 | |
| 17 | ND4x2 | Front Stabar | 07/25/02 | 09:45:00 | Slalom, Lane Change | |
| 18 | ND4x2 | C Factor | 07/25/02 | 10:30:00 | Slalom, Lane Change | |
| 19 | ND4x2 | Front Stabar StickSlip on Strut | 07/25/02 | 11:15:00 | ||
| 20 | ND4x2 | FLCA Bushings | 07/25/02 | 12;25 | FLCABase19, FLCASoft19, FLCASplit19 | |
| 21 | ND4x2 | GVW Front Bar | 07/25/02 | 15:00:00 | Slalom, Lane Change | gvw_22.asc, gvw_22i.asc, gvw_22lc.asc, gvw_23sl.asc, |
| 22 | ND 4x2 | GVW Rear Bar | 07/25/02 | 16:35:00 | Slalom, Lane Change | 30gvw_22.asc, 30gvw_22lc.asc, 30gvw_23sl.asc |
| 23 | ND 4x2 | CU Short Course | 07/26/02 | 10:00:00 | CU Short Lane Change | igfcu1.asc to 21, igfcu_gvw1.asc to 2, cu_darrell_run1.asc to 8, cu_gvw_darrell_run1.asc to 4, cu_gvw_run1.asc to 7, cu_run1.asc to 30 |
| 24 | ND4x2 | Caster Eval | 07/26/02 | 11:40:00 | Slalom | 23base, 237per, 23base63, 237per63 |
Table 3 - List of Runs with Data
Continue reading articles in my Mechanical Engineering series